The determinant of a square matrix is a number that provides a lot of useful information about the matrix.
Its definition is unfortunately not very intuitive. It is derived from abstract principles, laid out with the aim of satisfying a certain mathematical need. Therefore, before giving a definition of determinant, we explain what the mathematical need is.
![]()
Consider the linear space
![]() of all
of all
![]() real vectors. The space can be represented as a Cartesian plane. A vector
real vectors. The space can be represented as a Cartesian plane. A vector
![]() can be represented as a point in the plane, whose coordinates are the first
and second entry of
can be represented as a point in the plane, whose coordinates are the first
and second entry of
![]() respectively.
respectively.
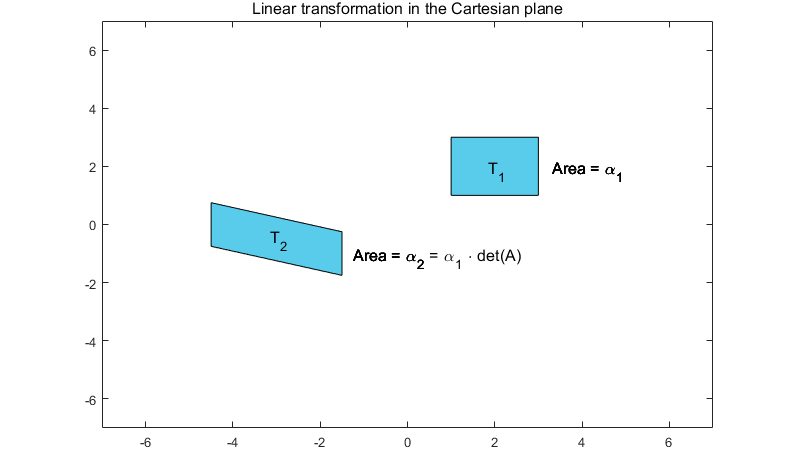
Let
![]() be a set of vectors such that the corresponding points in the Cartesian plane
form a region whose area can be measured and is equal to
be a set of vectors such that the corresponding points in the Cartesian plane
form a region whose area can be measured and is equal to
![]() .
.
Now, take a
![]() matrix
matrix
![]() and define the
set
and define the
set![]()
In other words, we use the square matrix
![]() to linearly transform all the vectors in the set
to linearly transform all the vectors in the set
![]() .
The resulting linear transformations are in the new set
.
The resulting linear transformations are in the new set
![]() .
.
In the Cartesian space, the points of
![]() form a region whose area is equal to
form a region whose area is equal to
![]() .
.
We ask the following question: can we derive the area
![]() from
from
![]() and
and
![]() ?
?
It turns out that there is a number, called the determinant of
![]() and denoted by
and denoted by
![]() ,
that
satisfies
,
that
satisfies![]() that
is, when we multiply the area of the original region by the determinant, we
obtain the area of the transformed region.
that
is, when we multiply the area of the original region by the determinant, we
obtain the area of the transformed region.
Importantly, the number depends only on
![]() and not on
and not on
![]() and its area. The linear transformation defined by
and its area. The linear transformation defined by
![]() transforms any region in a new region whose area is
transforms any region in a new region whose area is
![]() times the area of the original region.
times the area of the original region.
When we add one dimension and consider the space
![]() of
of
![]() real vectors, we make obvious changes: we are no longer in the Cartesian
plane, but in three-dimensional space; the matrix
real vectors, we make obvious changes: we are no longer in the Cartesian
plane, but in three-dimensional space; the matrix
![]() used to perform linear transformations is a
used to perform linear transformations is a
![]() matrix; the determinant is the scaling factor that allows us to compute the
volumes of the linearly transformed regions.
matrix; the determinant is the scaling factor that allows us to compute the
volumes of the linearly transformed regions.
In
![]() -dimensional
spaces (for
-dimensional
spaces (for
![]() ),
there are generalizations of the concept of volume, and linear transformations
are defined by
),
there are generalizations of the concept of volume, and linear transformations
are defined by
![]() matrices, but the determinant keeps playing the same role: it acts as a
scaling factor for the volume.
matrices, but the determinant keeps playing the same role: it acts as a
scaling factor for the volume.
We have said about volumes and how they are scaled by linear transformations, but we have omitted an important detail: when discussing determinants, we deal with signed volumes, that is, volumes that can be either positive or negative, depending on the orientation in space of the region whose volume is being measured. For this reason, also determinants can be positive or negative, depending on whether the linear transformation preserves or reverses the orientation of shapes.
As it can be difficult to get an intuitive grasp of the concept of signed volume, we are going to illustrate it with the following plots.
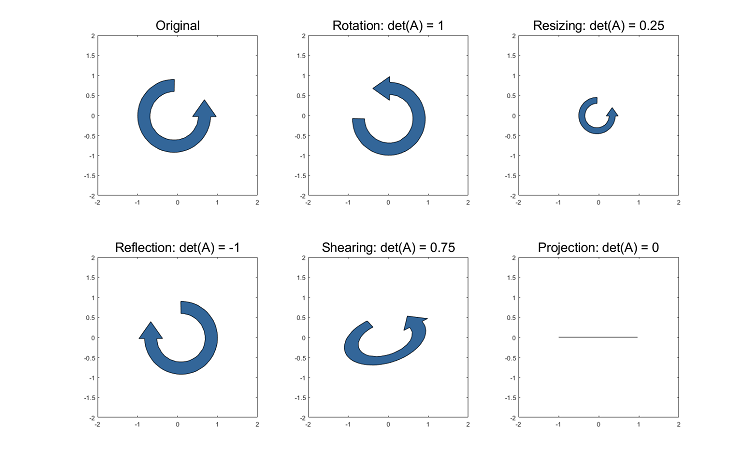
The Cartesian plane in the upper left corner represents the original linear
space. A set of points
![]() is depicted in blue (the circular arrow). The other five planes represent sets
of points
is depicted in blue (the circular arrow). The other five planes represent sets
of points
![]() that have been obtained by applying different linear transformations to
that have been obtained by applying different linear transformations to
![]() with different matrices
with different matrices
![]() :
:
rotation does not affect the area of the transformed region;
the determinant of the matrix
![]() used to rotate the shape is
used to rotate the shape is
![]() ;
;
resizing obviously affects the area of the region; in the
figure, the determinant of the matrix
![]() used to shrink the shape is less than
used to shrink the shape is less than
![]() ;
;
shearing is a deformation that can affect the area of the
deformed region; in the case displayed here, it shrinks the area; its
determinant is less than
![]() ;
;
reflection, like in a mirror, does not change the size of the
circular arrow, but it changes its orientation; after being reflected, the
direction of the arrow is clockwise, unlike the direction of the original,
which is counterclockwise; the determinant of
![]() is
is
![]() ,
because the transformation changes the orientation of the shape but not its
magnitude;
,
because the transformation changes the orientation of the shape but not its
magnitude;
projection of the shape on a 1-dimensional subspace
transforms it in a segment whose area is
![]() ;
the determinant of the matrix
;
the determinant of the matrix
![]() used to perform the projection is
used to perform the projection is
![]() .
.
Many more linear transformations can be performed, for example, by combining
the elementary transformations shown in the plot above. However, the principle
remains the same: if the linear transformation associated to the matrix
![]() does not change the orientation of the circular arrow, then
does not change the orientation of the circular arrow, then
![]() ;
if it changes the orientation, then
;
if it changes the orientation, then
![]() if the arrow is flattened (it loses one dimension), then
if the arrow is flattened (it loses one dimension), then
![]() .
.
In the next section we are going to provide a definition of determinant that
actually provides a way of calculating the determinant from the elements of
![]() .
That definition has been derived by mathematicians who took the following
steps:
.
That definition has been derived by mathematicians who took the following
steps:
they found some simple properties that are satisfied by the volumes of
linearly transformed regions (e.g., if a linear transformation doubles the
upper and lower edge of a rectangle and leaves its left and right edge
unchanged, then the area of the rectangle doubles; as a consequence, the
scaling factor of the linear transformation must be
![]() );
);
they imposed these properties as axioms that the determinant should satisfy;
they proved that a number satisfying the axioms exists and is unique;
they found a formula for calculating it, that can be used as its definition.
For more details about this axiomatic approach, you can refer to the beautiful treatment by Schneider and Barker (1989).
We are now ready to provide a formal definition of determinant.
Definition
Let
![]() be a
be a
![]() matrix. Let
matrix. Let
![]() be the set of all possible permutations of the first
be the set of all possible permutations of the first
![]() natural numbers
natural numbers
![]() The
determinant of
The
determinant of
![]() ,
denoted by
,
denoted by
![]() or by
or by
![]() ,
is
,
is![[eq11]](/images/determinant-of-a-matrix__60.png)
In order to fully understand this definition you need to be familiar with the concepts of permutation and sign of a permutation.
A permutation
![]() is an ordering of
is an ordering of
![]() .
The elements of the permutation are denoted by
.
The elements of the permutation are denoted by
![]() .
The number
.
The number
![]() is either
is either
![]() or
or
![]() depending on the parity of the permutation (even or odd).
depending on the parity of the permutation (even or odd).
The product
![[eq14]](data:image/gif;base64,R0lGODlhAQABAIAAANvf7wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==) is
over
is
over
![]() entries of the matrix
entries of the matrix
![]() .
For each row
.
For each row
![]() ,
we choose the entry located in column
,
we choose the entry located in column
![]() .
Note that there is exactly one chosen entry
.
Note that there is exactly one chosen entry
![]() in each column and row.
in each column and row.
The sum
![]() is over the set
is over the set
![]() of all possible permutations
of all possible permutations
![]() .
.
Let us apply the definition to the case of a
![]() matrix
matrix
![]() .
.
There are two possible permutations of the set of the first two natural
numbers:
There are no inversions in
![]() ,
so its parity is even
and
,
so its parity is even
and![]()
There is one inversion in
![]() ,
so its parity is odd
and
,
so its parity is odd
and![]()
Having established these facts, we can compute the determinant of
![]() :
:![[eq20]](/images/determinant-of-a-matrix__84.png)
Example
Define the
matrixIts
determinant
is
Let us now tackle the case of a
![]() matrix
matrix
![]() .
.
There are six possible permutations of the set of the first three natural
numbers. We report them below, together with the number of inversions and
their sign (deriving them is left as an exercise - revise the lecture on the
sign of a permutation if you find any
difficulties):![[eq23]](/images/determinant-of-a-matrix__89.png)
Therefore,![[eq24]](/images/determinant-of-a-matrix__90.png)
Below you can find some exercises with explained solutions.
Find the determinant of the
matrix
We can apply the formula for the
determinant of a
![]() matrix found
above
matrix found
above![[eq26]](/images/determinant-of-a-matrix__93.png)
The matrix used to perform the reflection in the lower left panel of the
figure above is
Prove
that
![]() .
.
We have
![[eq29]](/images/determinant-of-a-matrix__96.png)
Schneider, H., and Barker, G. P. (1989) Matrices and linear algebra, Dover Publications.
Please cite as:
Taboga, Marco (2021). "Determinant of a matrix", Lectures on matrix algebra. https://www.statlect.com/matrix-algebra/determinant-of-a-matrix.
Most of the learning materials found on this website are now available in a traditional textbook format.